Cross-validation iterators in scikit-learn are simply generator objects, that is, Python objects that implement the __iter__ method and that for each call to this method return (or more precisely, yield) the indices or a boolean mask for the train and test set. Hence, implementing new cross-validation iterators that behave as …
Due to lack of time and interest, I'm no longer maintaining this project. Feel free to grab the sources from https://github.com/fabianp/nbgallery and fork the project.
TL;DR I created a gallery for IPython/Jupyter notebooks. Check it out :-)
A couple of months ago I put online …
Last Friday was PyData Paris, in words of the organizers, ''a gathering of users and developers of data analysis tools in Python''.

The organizers did a great job in putting together and the event started already with a full room for Gael's keynote
My take-away message from the talks is …
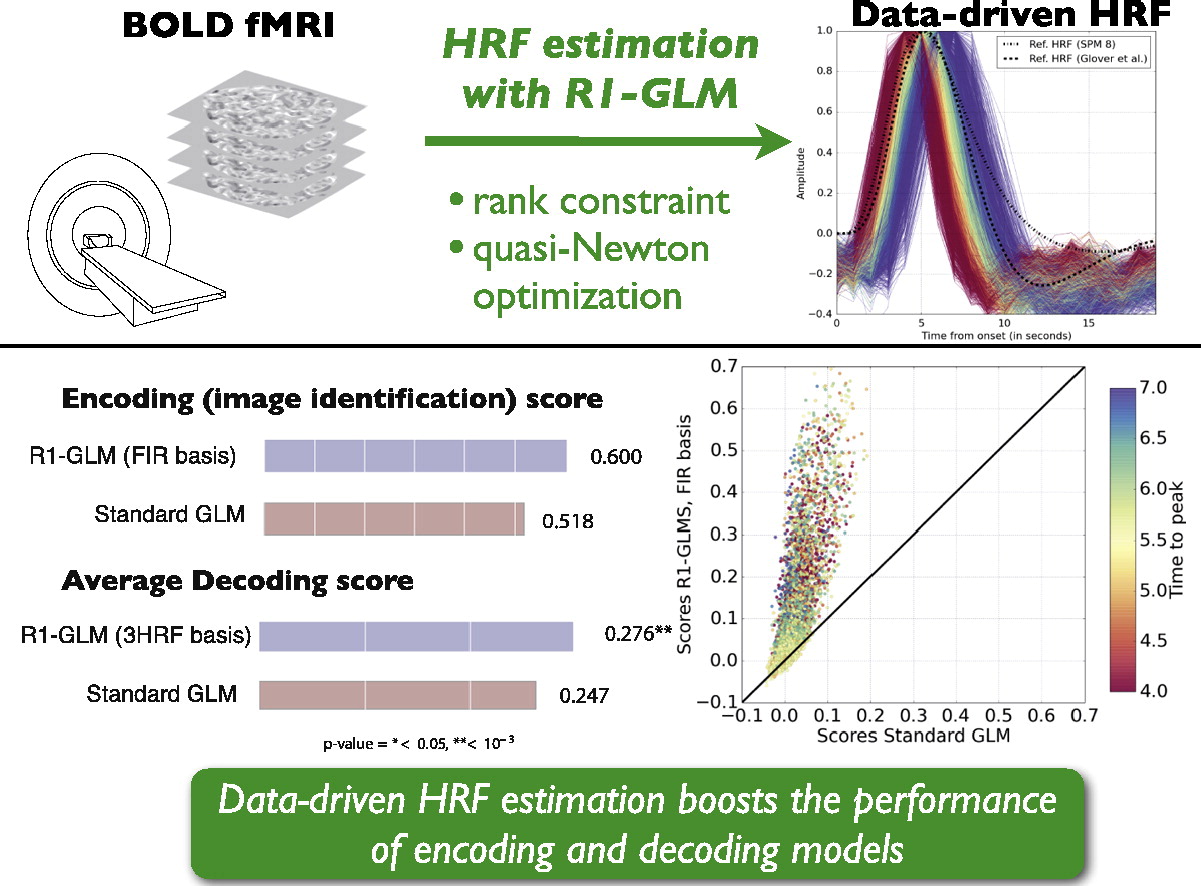
My latest research paper[] deals with the estimation of the hemodynamic response function (HRF) from fMRI data.
This is an important topic since the knowledge of a hemodynamic response function is what makes it possible to extract the brain activation maps that are used in most of the impressive …
:og_image: http://fa.bianp.net/blog/images/2014/mprof_example.png
One of the lesser known features of the memory_profiler package is its ability to plot memory consumption as a function of time. This was implemented by my friend Philippe Gervais, previously a colleague at INRIA and now at Google.
With …
TL; DR These are some notes on calibration of surrogate loss functions in the context of machine learning. But mostly it is …
As part of the development of
memory_profiler I've tried
several ways to get memory usage of a program from within Python. In this post
I'll describe the different alternatives I've tested.
The psutil library
psutil is a python library that provides
an interface for retrieving information on running processes. It …
In this post I compar several implementations of
Logistic Regression. The task was to implement a Logistic Regression model
using standard optimization …
TL;DR: I've implemented a logistic ordinal regression or
proportional odds model. Here is the Python code
The logistic ordinal regression model …
My latest contribution for scikit-learn is
an implementation of the isotonic regression model that I coded with
Nelle Varoquaux and
Alexandre Gramfort …
Householder matrices are square matrices of the form
$$ P = I - \beta v v^T$$
where $\beta$ is a scalar and $v$ is …
** Note: this post contains a fair amount of LaTeX, if you don't
visualize the math correctly come to its original location **
In …
Besides performing a line-by-line analysis of memory consumption,
memory_profiler
exposes some functions that allow to retrieve the memory consumption
of a function in real-time, allowing e.g. to visualize the memory
consumption of a given function over time.
The function to be used is memory_usage. The first argument
specifies what …
SciPy contains two methods to compute the singular value decomposition (SVD) of a matrix: scipy.linalg.svd and scipy.sparse.linalg.svds. In this post I'll compare both methods for the task of computing the full SVD of a large dense matrix.
The first method, scipy.linalg.svd, is perhaps …
This tutorial introduces the concept of pairwise preference used in most ranking problems. I'll use scikit-learn and for learning and matplotlib for …
My newest project is a Python library for monitoring memory consumption
of arbitrary process, and one of its most useful features is the
line-by-line analysis of memory usage for Python code. I wrote a basic
prototype six months ago after being surprised by the lack of related
tools. I wanted …
A little experiment to see what low rank approximation looks like. These
are the best rank-k approximations (in the Frobenius norm) to the a
natural image for increasing values of k and an original image of rank
512.
Python code can be found here. GIF animation made
using ImageMagic's convert …
In scipy's development version there's a new function closely related to
the QR-decomposition of a matrix and to the least-squares solution of
a linear system. What this function does is to compute the
QR-decomposition of a matrix and then multiply the resulting orthogonal
factor by another arbitrary matrix. In pseudocode …
Last week we released a new version of scikit-learn. The Changelog is
particularly impressive, yet personally this release is important for
other reasons. This will probably be my last release as a paid engineer.
I'm starting a PhD next month, and although I plan to continue
contributing to the project …
I've been working lately in improving the scikit-learn example gallery
to show also a small thumbnail of the plotted result. Here is what the
gallery looks like now:
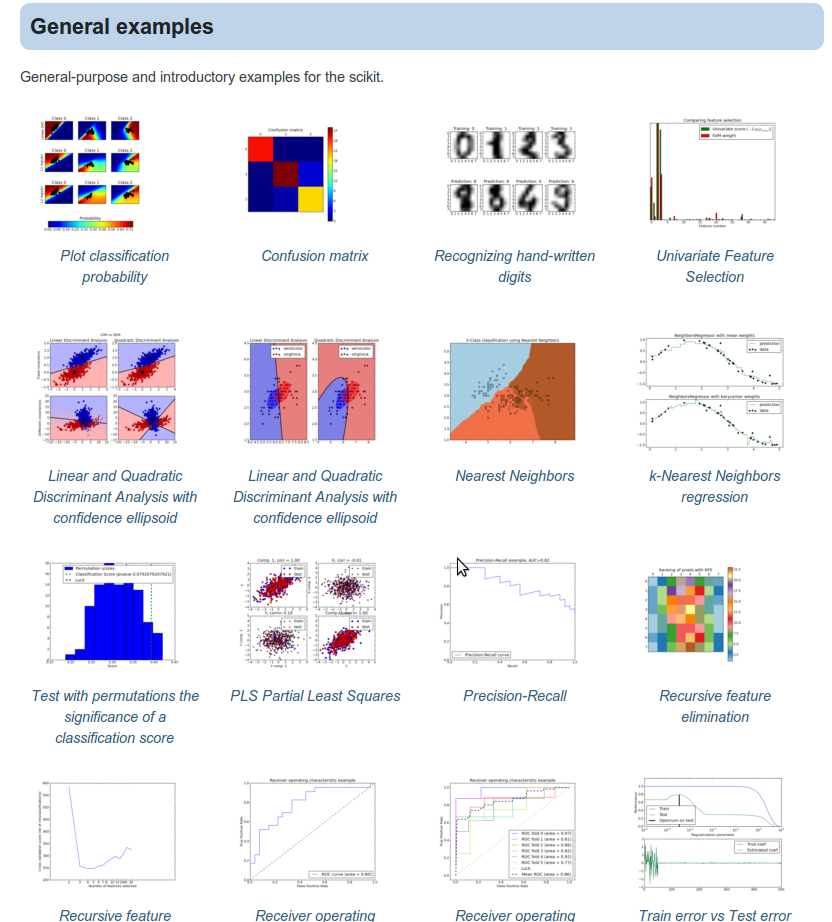
And the real thing should be already displayed in the development-documentation. The next thing is to add a static image to those …

Today's coding sprint was a bit more crowded, with some
notable scipy hackers such as Ralph Gommers, Stefan van der Walt,
David Cournapeau or Fernando Perez from Ipython joining in. On
what got done: - We merged Jake's new BallTree code. This is a pure
Cython implementation of a nearest-neighbor …
As a warm-up for the upcoming EuroScipy-conference, some of the
scikit-learn developers decided to gather and work together for a
couple of days. Today was the first day and there was only a handfull of
us, as the real kickoff is expected tomorrow. Some interesting coding
happened, although most of …
Ridge coefficients for multiple values of the regularization parameter
can be elegantly computed by updating the thin SVD decomposition of
the design matrix:
import numpy as np
from scipy import linalg
def ridge(A, b, alphas):
"""
Return coefficients for regularized least squares
min ||A x - b||^2 + alpha ||x||^2 …I haven't worked in the manifold module since last time, yet thanks
to Jake VanderPlas there are some cool features I can talk about.
First of, the ARPACK backend is finally working and gives factor one
speedup over the lobcpg + PyAMG approach. The key is to use ARPACK's
shift-invert mode …
The manifold module in scikit-learn is slowly progressing: the
locally linear embedding implementation was finally merged along with
some documentation. At about the same time but in a different
timezone, Jake VanderPlas began coding other manifold learning
methods and back in Paris Olivier Grisel made my digits example
a lot …